library: libGeom
#include "TGeoNode.h" |
TGeoNode
class description - source file - inheritance tree (.pdf)
This is an abstract class, constructors will not be documented.
Look at the header to check for available constructors.
public:
virtual ~TGeoNode()
virtual void Browse(TBrowser* b)
virtual void cd() const
void CheckShapes()
static TClass* Class()
virtual void Draw(Option_t* option = "")
void DrawOnly(Option_t* option = "")
void DrawOverlaps()
void FillIdArray(Int_t& ifree, Int_t& nodeid, Int_t* array) const
Int_t FindNode(const TGeoNode* node, Int_t level)
virtual Int_t GetByteCount() const
Int_t GetColour() const
TGeoNode* GetDaughter(Int_t ind) const
virtual TGeoPatternFinder* GetFinder() const
virtual Int_t GetIndex() const
virtual TGeoMatrix* GetMatrix() const
TGeoMedium* GetMedium() const
TGeoVolume* GetMotherVolume() const
Int_t GetNdaughters() const
TObjArray* GetNodes() const
Int_t GetNumber() const
virtual Int_t GetOptimalVoxels() const
Int_t* GetOverlaps(Int_t& novlp) const
TGeoVolume* GetVolume() const
void InspectNode() const
virtual TClass* IsA() const
virtual Bool_t IsFolder() const
Bool_t IsOffset() const
Bool_t IsOnScreen() const
Bool_t IsOverlapping() const
Bool_t IsVirtual() const
Bool_t IsVisDaughters() const
Bool_t IsVisible() const
virtual void LocalToMaster(const Double_t* local, Double_t* master) const
virtual void LocalToMasterVect(const Double_t* local, Double_t* master) const
virtual void ls(Option_t* option = "") const
virtual TGeoNode* MakeCopyNode() const
virtual void MasterToLocal(const Double_t* master, Double_t* local) const
virtual void MasterToLocalVect(const Double_t* master, Double_t* local) const
TGeoNode& operator=(const TGeoNode&)
virtual void Paint(Option_t* option = "")
void PrintCandidates() const
void PrintOverlaps() const
Double_t Safety(Double_t* point, Bool_t in = kTRUE) const
void SaveAttributes(ofstream& out)
void SetAllInvisible()
void SetCurrentPoint(Double_t x, Double_t y, Double_t z)
void SetInvisible()
void SetMotherVolume(const TGeoVolume* mother)
void SetNumber(Int_t number)
void SetOverlapping()
void SetOverlaps(Int_t* ovlp, Int_t novlp)
void SetVirtual()
virtual void SetVisibility(Bool_t vis = kTRUE)
void SetVolume(const TGeoVolume* volume)
virtual void ShowMembers(TMemberInspector& insp, char* parent)
virtual void Streamer(TBuffer& b)
void StreamerNVirtual(TBuffer& b)
void VisibleDaughters(Bool_t vis = kTRUE)
protected:
TGeoVolume* fVolume volume associated with this
TGeoVolume* fMother mother volume
Int_t fNumber copy number
Int_t fNovlp number of overlaps
Int_t* fOverlaps [fNovlp] list of indices for overlapping brothers
public:
static const enum TGeoNode:: kGeoNodeMatrix
static const enum TGeoNode:: kGeoNodeOffset
static const enum TGeoNode:: kGeoNodeVC
static const enum TGeoNode:: kGeoNodeOverlap
TGeoNode
_________
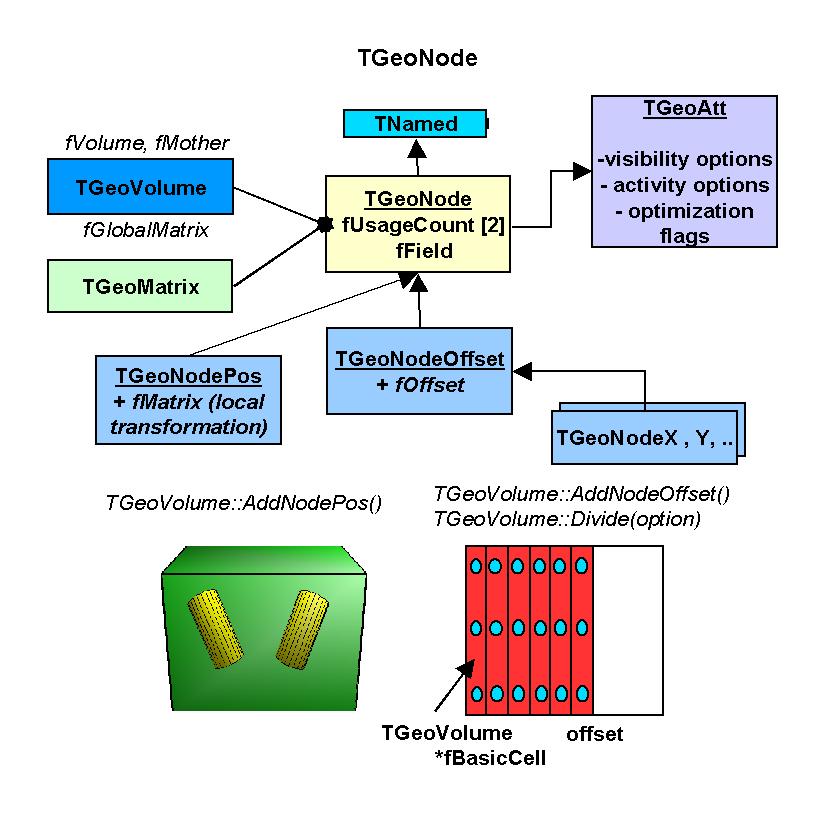
A node represent a volume positioned inside another.They store links to both
volumes and to the TGeoMatrix representing the relative positioning. Node are
never instanciated directly by users, but created as a result of volume operations.
Adding a volume named A with a given user ID inside a volume B will create a node
node named A_ID. This will be added to the list of nodes stored by B. Also,
when applying a division operation in N slices to a volume A, a list of nodes
B_1, B_2, ..., B_N is also created. A node B_i does not represent a unique
object in the geometry because its container A might be at its turn positioned
as node inside several other volumes. Only when a complete branch of nodes
is fully defined up to the top node in the geometry, a given path like:
/TOP_1/.../A_3/B_7 will represent an unique object. Its global transformation
matrix can be computed as the pile-up of all local transformations in its
branch. We will therefore call "logical graph" the hierarchy defined by nodes
and volumes. The expansion of the logical graph by all possible paths defines
a tree sructure where all nodes are unique "touchable" objects. We will call
this the "physical tree". Unlike the logical graph, the physical tree can
become a huge structure with several milions of nodes in case of complex
geometries, therefore it is not always a good idea to keep it transient
in memory. Since a the logical and physical structures are correlated, the
modeller rather keeps track only of the current branch, updating the current
global matrix at each change of the level in geometry. The current physical node
is not an object that can be asked for at a given moment, but rather represented
by the combination: current node + current global matrix. However, physical nodes
have unique ID's that can be retreived for a given modeler state. These can be
fed back to the modeler in order to force a physical node to become current.
The advantage of this comes from the fact that all navigation queries check
first the current node, therefore knowing the location of a point in the
geometry can be saved as a starting state for later use.
Nodes can be declared as "overlapping" in case they do overlap with other
nodes inside the same container or extrude this container. Non-overlapping
nodes can be created with:
TGeoVolume::AddNode(TGeoVolume *daughter, Int_t copy_No, TGeoMatrix *matr);
The creation of overapping nodes can be done with a similar prototype:
TGeoVolume::AddNodeOverlap(same arguments);
When closing the geometry, overlapping nodes perform a check of possible
overlaps with their neighbours. These are stored and checked all the time
during navigation, therefore navigation is slower when embedding such nodes
into geometry.
Node have visualization attributes as volume have. When undefined by users,
painting a node on a pad will take the corresponding volume attributes.
/*
 */
*/
~TGeoNode()
Destructor
void Browse(TBrowser *b)
Bool_t IsOnScreen() const
check if this node is drawn. Assumes that this node is current
void InspectNode() const
void CheckShapes()
check for wrong parameters in shapes
void DrawOnly(Option_t *option)
draw only this node independently of its vis options
void Draw(Option_t *option)
draw current node according to option
void DrawOverlaps()
void FillIdArray(Int_t &ifree, Int_t &nodeid, Int_t *array) const
Fill array with node id. Recursive on node branch.
Int_t FindNode(const TGeoNode *node, Int_t level)
void SaveAttributes(ofstream &out)
save attributes for this node
void MasterToLocal(const Double_t *master, Double_t *local) const
Convert the point coordinates from mother reference to local reference system
void MasterToLocalVect(const Double_t *master, Double_t *local) const
Convert a vector from mother reference to local reference system
void LocalToMaster(const Double_t *local, Double_t *master) const
Convert the point coordinates from local reference system to mother reference
void LocalToMasterVect(const Double_t *local, Double_t *master) const
Convert a vector from local reference system to mother reference
void ls(Option_t * /*option*/) const
Print the path (A/B/C/...) to this node on stdout
void Paint(Option_t *option)
Paint this node and its content according to visualization settings.
void PrintCandidates() const
print daughters candidates for containing current point
cd();
void PrintOverlaps() const
print possible overlapping nodes
Double_t Safety(Double_t *point, Bool_t in) const
computes the closest distance from given point to this shape
void SetOverlaps(Int_t *ovlp, Int_t novlp)
set the list of overlaps for this node (ovlp must be created with operator new)
void SetVisibility(Bool_t vis)
void VisibleDaughters(Bool_t vis)
Inline Functions
void cd() const
Int_t GetByteCount() const
TGeoNode* GetDaughter(Int_t ind) const
TGeoMatrix* GetMatrix() const
Int_t GetColour() const
Int_t GetIndex() const
TGeoPatternFinder* GetFinder() const
TGeoMedium* GetMedium() const
TGeoVolume* GetMotherVolume() const
Int_t GetNdaughters() const
TObjArray* GetNodes() const
Int_t GetNumber() const
Int_t* GetOverlaps(Int_t& novlp) const
TGeoVolume* GetVolume() const
Int_t GetOptimalVoxels() const
Bool_t IsFolder() const
Bool_t IsOffset() const
Bool_t IsOverlapping() const
Bool_t IsVirtual() const
Bool_t IsVisible() const
Bool_t IsVisDaughters() const
TGeoNode* MakeCopyNode() const
void SetCurrentPoint(Double_t x, Double_t y, Double_t z)
void SetVolume(const TGeoVolume* volume)
void SetNumber(Int_t number)
void SetOverlapping()
void SetVirtual()
void SetInvisible()
void SetAllInvisible()
void SetMotherVolume(const TGeoVolume* mother)
TClass* Class()
TClass* IsA() const
void ShowMembers(TMemberInspector& insp, char* parent)
void Streamer(TBuffer& b)
void StreamerNVirtual(TBuffer& b)
TGeoNode& operator=(const TGeoNode&)
Author: Andrei Gheata 24/10/01
Last update: root/geom:$Name: $:$Id: TGeoNode.cxx,v 1.25 2005/09/02 13:54:38 brun Exp $
Copyright (C) 1995-2000, Rene Brun and Fons Rademakers. *
ROOT page - Class index - Class Hierarchy - Top of the page
This page has been automatically generated. If you have any comments or suggestions about the page layout send a mail to ROOT support, or contact the developers with any questions or problems regarding ROOT.